




Droonit, robotit ja parviäly – enemmän kuin leluja
Droonit mielletään usein moderneiksi innovaatioiksi, niiden historia ulottuu kuitenkin jo yli sadan vuoden taakse: 21. maaliskuuta 1917 testattiin Archibald Montgomery Lowen kehittämää miehittämätöntä ”Aerial Target” -ilma-alusta (Imperial War Museums 2025). Tämä kehityskaari – yksinkertaisista kokeiluista nykypäivän älykkäisiin järjestelmiin – kuvastaa droonien siirtymistä leluista laajasti hyödynnettäviksi työkaluiksi, kuten voidaan todeta Geologian tutkimuskeskuksen “Miehittämättömät ilma-alukset malminetsinnässä ja kaivostoiminnassa” -raportissa (Salmirinne ym. 2017).

Kuva 1. DJI Matrice 300 RTK -nelikopteri varustettuna Zenmuse L1 -LiDAR-laserkeilaimella ja tarkalla päivä- sekä yökäyttöön soveltuvalla Zenmuse H30 -mallin kameralla. Kuva: Vesa Tuomala.
Droonien hyödyntäminen on monilla toimialoilla sekä tuottoisaa että tehokasta
Droonit toimivat monipuolisina alustoina, joihin voidaan liittää erilaisia antureita, sensoreita ja kameroita ympäristön, rakenteiden ja ilmakehän mittaamista varten. Näihin kuuluvat esimerkiksi LiDAR-laserkeilaimet, sää-, kaasu- ja ilmanlaatumittarit sekä erilaiset kuvantamislaitteet. Drooneilla voidaan kerätä tarkkaa tietoa ilmasta käsin myös vaikeakulkuisista paikoista, joihin ihmisten tai ajoneuvojen on hankala päästä. Ne ovatkin verrattomia työkaluja esimerkiksi kuvantamiseen, kartoitukseen, tavaroiden kuljetukseen ja turvallisuusvalvontaan. Drooneilla voidaan lentää perinteisiä ilma-aluksia matalammalla ja kuvata yksityiskohtaisemmin, mikä parantaa analyysien tarkkuutta. Lisäksi niiden käyttökustannukset ovat usein huomattavasti edullisemmat. Kerätty data analysoidaan ohjelmistoilla, ja sen perusteella tehdään johtopäätöksiä, joilla voidaan ohjata yritysten toimintaa. (Salmirinne ym. 2017; Tuomala 2024a).
Droonit maa- ja metsätalouden tukena
Maa- ja metsätaloudessa drooneja käytetään kasvillisuuden ja metsien kunnon seurantaan sekä lannoitustarpeen arviointiin. Droonit voivat myös levittää lannoitteet täsmällisesti oikeaan paikkaan, oikeaan aikaan ja juuri sopivan määrän. Potentiaalisia maatalouden sovellusalueita ovat täsmäviljely (ravinnetasapaino, vesistressi ja kasviterveys) sekä metsäntutkimuksessa inventointi ja hyönteistuhojen tutkimus (Salmirinne ym. 2017),
Myös metsien kartoitus onnistuu tehokkaasti miehittämättömillä ilma-aluksilla ja niihin asennetuilla LiDAR-, multispektri- ja lämpökameroilla. Tulevaisuudessa tekoäly ja automaatio tulevat yhä enemmän tukemaan tiedolla johdettua päätöksentekoa kestävän maa- ja metsätalouden alalla. (Ehrnrooth ym. 2022; Laitinen & Ronkainen 2021; Tuomala 2024b; Tuominen 2020).

Kuva 2. DJI Zenmuse L1 LiDAR -laserkeilain kartoittamiseen. Kuva: Vesa Tuomala.
Drooneja käytetään kaukokartoittamisessa myös ympäristö- ja säämittauksissa, sekä veden-, että ilmanlaadun ja uv-säteilyn tarkkailussa. Rakennuksien kuntotarkastuksissa voidaan kiinteistöjen rakenteita tarkastella lämpökameralla ja korkearesoluutioisella kameralla. Yleisesti infrastruktuurin ruostumisen, eli korroosion ja halkeamien havaitsemiseen voidaan käyttää ultraäänisensoreita ja lämpökameroita. Aurinkopaneelivoimaloiden ja sähköverkkojen voimalinjojen tarkastukseen voidaan käyttää LiDAR-laserkeilainta, visuaalista spektrikameraa ja lämpökameraa (Tuominen 2020; Ehrnrooth ym. 2022).
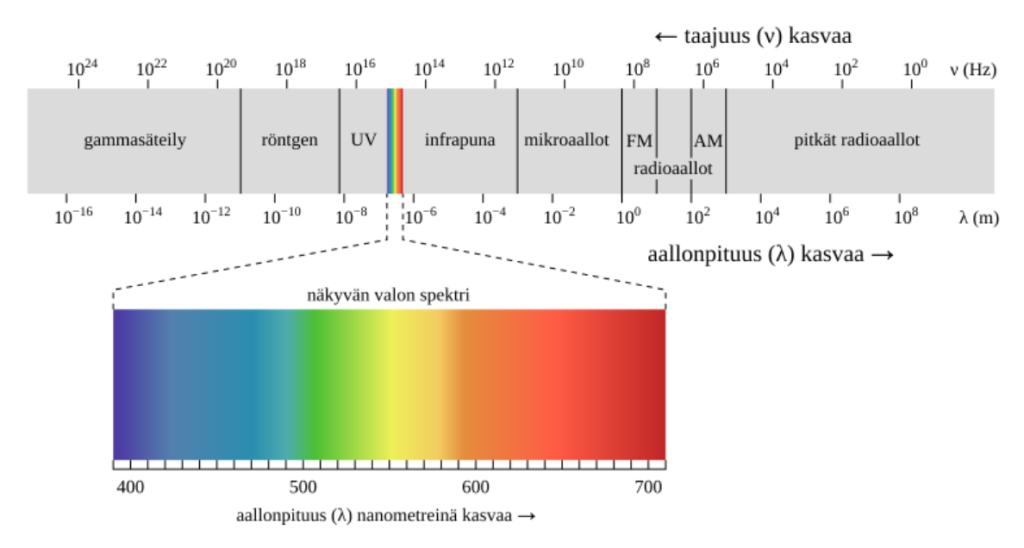
Kuva 3. Näkyvä valo on vain pieni osa sähkömagneettista spektriä. Kuva: Wikimedia Commons.
Näkyvä valo on vain pieni osa sähkömagneettista spektriä, kuten yllä olevassa kuvassa on esitetty. Hyperspektrikameralla on mahdollista kattaa näkyvä valo, ultraviolettialue (UV) ja lähi-infrapuna-alueen (Mäkynen 2009; Salmirinne ym. 2017; Tuominen 2020). Hyperspektrikuvausta käytetään yleisimmin metsätalouden ja maankäytön tutkimuksiin, kasvillisuuskartoituksiin, mineraalien tunnistamiseen ja malmiesiintymien kartoitukseen (Panttila & Valta 2022).
Näkyvän valon aallonpituus on noin 400–700 nanometriä, ja sen taajuus on 400–800 terahertsiä. Ihmissilmä pystyy havaitsemaan tämän osan sähkömagneettisesta säteilystä (Tuominen 2020). Kun valkoinen valo kulkee prisman läpi, se jakautuu seitsemään eri väriin. Aurinko on luonnollinen näkyvän valon lähde.

Kuva 4. Mapir OCN, eli Orange, Cyan, NIR (Near-infrared) ja Mapir NGB, eli NIR (Near-infrared), Green, Blue -multispektrikamerat asennettuna Xamkin iäkkääseen DJI Phantom 4 -kuluttajatason nelikopteriin (Vesa Tuomala)
Malminetsinässä ja kaivosteollisuudessa voidaan maaperää ja mineraaleja analysoida käyttämällä hyperspektrikameraa ja spektrometriä (Salmirinne ym. 2017). Raman-spektrometri käyttää valonlähteenä laseria, joka saa aikaan ilmiön, jota kutsutaan Raman-sironnaksi. Tämä sironta voidaan analysoida Raman-spektrometrillä. Laitteen anturi havaitsee sironnan ja käsittelee tiedon, minkä jälkeen voidaan piirtää näytteen spektri eli sen ainutlaatuinen ”sormenjälki”. (Haukilahti 2018). Raman spektrometrin voi asentaa myös miehittämättömään maakulkuneuvoon.
Kartoituksessa ja tilavuusmittauksissa voidaan käyttää LiDAR-laserkeilainmenetelmää, jolla saadaan mittatarkkaa kolmiulotteista korko- ja pinta-alamittaustietoa (Salmirinne ym. 2017) sekä kuvamittausta, eli fotogrammetriaa. Molemmilla tavoilla voidaan kuvantaa ja mallintaa kolmiulotteisia 3D-pistepilviä, joilla voidaan määritellä kuvasta tilavuuksia, muotoja ja rakenteita, sekä arvioida mahdollisia luonnonkatastrofeja ja suunnitella suojaustoimia. 3D-mallinnusta käytetään kartoituksessa ja paikkatiedon, maanmuotojen ja -alueiden analyysissä.
Vesitutkimuksessa voidaan miehittämättömillä laitteilla, hyperspektrisillä laitteilla ja lämpökameroilla mitata vedenlaatua, pohja- sekä pintavesien lämpötilaeroja (Salmirinne ym. 2018), että pH-arvoa, sameutta, hapettumispotentiaalia ja sähkönjohtavuutta.
Lämpökameroilla tuotetaan kuvia infrapunasäteilyn aallonpituusalueelta 8 000–14 000 nm (Panttila & Valta 2022). Droonit ovat tärkeä apuväline lämpökameroilla varustettuina pelastus- ja turvallisuustehtävissä, niitä käytetään esimerkiksi tulipalojen havaitsemiseen ja ihmisten etsintään.
Sotilas- ja puolustusteknologiassa droonit ovat olleet jo pitkään käytössä tiedustelussa ja valvonnassa. Niitä käytetään myös elektronisessa sodankäynnissä ja signaalihäirinnässä. Miehittämättömät laitteet ovat muutamassa vuodessa nousseet useimpien tietoisuuteen varsinkin Venäjän hyökkäyssodan takia Ukrainassa. Tämä on tehnyt drooneista entistä tärkeämpiä nykyaikaisessa sodankäynnissä, niiden käytön ollessa nopeaa ja joustavaa.
UAV-laitteiden (droonien) hiilijalanjälki on murto-osa perinteisillä menetelmillä tehtyihin toimiin verrattaessa (Salmirinne ym. 2017). Droonien käyttö on edullista, sillä ne eivät vaadi kalliita laitteita tai toimintaan suurta henkilöstömäärää – lisäten samalla turvallisuutta riskialueilla. Sähkökäyttöiset droonit ovat tehokkaita ja edullisia käyttökustannuksiltaan ja tuottavat vähemmän päästöjä kuin perinteiset kiinteäsiipiset lentokoneet tai helikopterit. Järjestelmien kehittyessä tarvitaan vielä ihmistyövoimaa vaativien lentotehtävien suorittamiseen.
Autonomisten järjestelmien kehitys parviälylliseksi
Kuva 5. Parviäly nähdään robotiikassa itsenäisenä ryhmänä toimivia drooneja. Kuva: Ailisto, H. (toim.) ym. 2018.
“Tekoälyn avulla koneet, laitteet, ohjelmat, järjestelmät ja palvelut voivat toimia tehtävän ja tilanteen mukaisesti järkevällä tavalla”, määrittelee Valtioneuvoston Tekoälyn kokonaiskuva ja osaamiskartoitus -selvitys vuodelta 2018.
Algoritmit ovat Tieteen termipankin mukaan täsmällisesti määriteltyjä käskyjä tai toimenpiteitä, joiden avulla tehtävät suoritetaan järjestelmällisesti (TEPA-termipankki 2025a). Tieteen termipankki puolestaan selvittää parviälyn olevan ”ryhmän jäsenten keskinäiseen vuorovaikutukseen perustuva kyky oppia, ymmärtää, muodostaa tietoa ja suorittaa muita älyyn pohjautuvia toimintoja” (TEPA-termipankki 2025b).
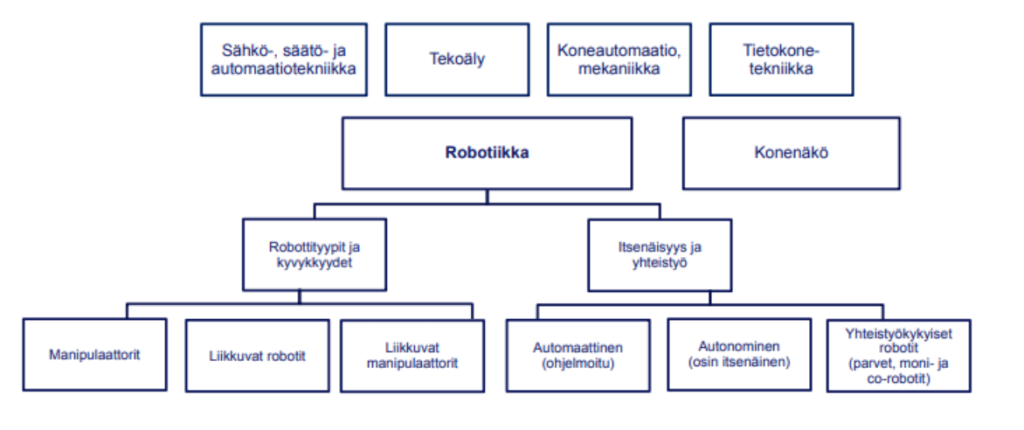
Gerardo Benin ja Jing Wangin artikkeli vuodelta 1993 selittää robotiikan ja parviälyn (Swarm Intelligence) yhteyden toisiinsa. Robotiikka ja parviäly kytkeytyvät toisiinsa hajautettujen järjestelmien kautta – yksinkertaiset ja itsenäiset robotit toimivat yhdessä ilman ihmisen ohjausta sekä kykenevät yhdessä ratkaisemaan monimutkaisia tehtäviä, kuten esimerkiksi ympäristön kartoituksessa, etsintäoperaatioissa ja logistiikan kuljetuksissa. Parviäly perustuu luonnosta tuttuihin malleihin; muurahaisten, lintujen ja kalojen käyttäytymiseen. Artikkelin mukaan hajautettu solupohjainen robotiikkajärjestelmä (Cellular Robotic System) eli suuri määrä ei-älykkäitä robottiyksiköitä koordinoivat keskenään toimintaansa viestinnän avulla tuottaen parviälyä. Tämä mahdollistaa joustavan, vikasietoisen ja skaalautuvan toiminnan. (Beni & Wang 1993).
Tunnetuimpia parviälymalleja ovat Particle Swarm Optimization, PSO (Autio 2012; Huovila 2015) ja Ant Colony Optimization, ACO (Huovila 2015). PSO-mallin suomenkielinen vastine on ”hiukkasparvioptimointi” (Autio 2012; Huovila 2015) ja ACO-mallin ”muurahaiskoloniaoptimointi” (Huovila 2015). Nämä mallit perustuvat luonnonilmiöihin ja on kehitetty kala- ja lintuparvien sekä muurahaisten käyttäytymisen pohjalta. Parviäly-termiä käytettiin aluksi robotiikan tutkimuksessa (Beni & Wang 1993; Brambilla ym. 2012), mutta nyttemmin sitä on alettu myös käyttää ihmisten välisessä ryhmätyöskentelyssä – kutsuen sitä englanninkielisillä termeillä ”social swarming” tai ”human swarming” (Rosenberg 2015).
PSO-mallia sovelletaan koneoppimiseen ja tekoälyyn sekä teollisuuden optimointiongelmiin, kuten reititykseen ja resurssienhallintaan. Lisäksi sitä käytetään robotiikan ja autonomisten järjestelmien ohjauksessa sekä kuvantunnistuksessa ja signaalinkäsittelyssä. Näiden mallien avulla voidaan kehittää joustavia ja tehokkaita toimintatapoja drooniparville ja tulevaisuuden autonomisille järjestelmille.
Parviäly droonien autonomisuuden perustana
Parviäly mahdollistaa droonien itsenäisen tehtävien jaon, mikä tehostaa lentotoimintaa merkittävästi. Esimerkiksi laajojen alueiden kartoituksessa drooniparvi voi jakautua kattamaan eri sektoreita samanaikaisesti, mikä säästää aikaa ja resursseja. Jos yksi yksikkö vikaantuu, parvi sopeutuu dynaamisesti jatkamaan tehtävää ilman ulkopuolista ohjausta. (Ailisto, H. ym. 2018) Tämä hajautettu älykkyys vähentää riippuvuutta keskitetystä hallinnasta ja korostaa parviälyn potentiaalia vaativissa olosuhteissa, kuten pelastustehtävissä tai sotilasoperaatioissa.
Droonien, robottien ja parviälyn yhdistäminen mahdollistaa tehokkaat autonomiset järjestelmät, joissa miehittämättömät ilma-alukset ja robotit tekevät itsenäisiä päätöksiä, sopeutuvat muuttuviin olosuhteisiin ja muokkaavat toimintaansa reaaliaikaisesti.
Drooneja on voitu jo pitkään lennättää ja ohjata automaattisesti ohjelmoidun reitin mukaisesti, kulkien reittipisteeltä toiselle. Miehittämättömiin laitteisiin on vähitellen lisätty yhä enemmän sensoreita, jotka tunnistavat esteitä ja voivat automaattisesti väistää niitä törmäysten välttämiseksi.
Miehittämättömien laitteiden kehittäminen parviälylliseksi tarkoittaa, että droonit ja robotit voivat toimia itsenäisesti älykkäänä ryhmänä ilman jatkuvaa ihmisen ohjausta. Tämä perustuu hajautettuun päätöksentekoon, jossa jokainen yksikkö tekee itsenäisiä ratkaisuja paikallisen tiedon perusteella ja jakaa sen muille ryhmän jäsenille. Yksittäinen drooni voi lähettää tietoa ryhmälle 5G-verkon tai IoT-teknologioiden, kuten V2V (Vehicle-to-Vehicle) -yhteyksien, avulla.
Anturien ja sensoreiden keräämän tiedon perusteella yksittäinen drooni jakaa parvelle havaintojaan, jotka yhdistyvät reaaliaikaiseksi tilannekuvaksi. Droonien ja robottien sensoreina voivat toimia kamerat, LiDAR-laserkeilaimet ja lämpökamerat, jotka havainnoivat ympäristöä. Tekoälyn ja koneoppimisen ansiosta järjestelmät oppivat ja sopeutuvat joustaviksi sekä tehokkaiksi edistyneiden algoritmien avulla.
Mitä parviälytulevaisuus tuo tullessaan? Tulevaisuuden näkymät
Drooniteknologian ja parviälyn yhdistelmä avaa valtavia mahdollisuuksia, kuten Tampereen yliopiston tutkijat jo vuonna 2019 korostivat (Kähkönen 2019). Autonominen valvonta, katastrofialueiden pelastustehtävät, rakennusyhteistyö ja ympäristöseuranta ovat vain osa sovellusalueista, joissa drooniparvet voivat mullistaa toimintatapoja. Kuitenkin teknologian laajamittainen käyttöönotto edellyttää haasteiden ratkaisemista: lainsäädännön kehittäminen, yksityisyyden suoja ja droonien turvallisuus vaativat huomiota.
Drooniteknologia on kehittynyt viime vuosikymmenten aikana ja parviälyn kautta drooniparvet voivat toteuttaa monimutkaisia tehtäviä. Parviälyn käyttökohteita ovat ympäristön kartoitus maataloudessa, pelastus- ja turvallisuustehtävät, logistiikka ja sotilastehtävät, kuten tiedustelu, elektroninen sodankäynti ja kohteiden autonominen tarkkailu ilman ohjaavan ihmisen apua.
Tulevaisuudessa autonomisissa järjestelmissä yhdistetään robotit ja parviäly. Parviälyn ansiosta autonomiset robottiparvet voivat toimia hajautetulla ohjauksella ilman keskitettyä komentokeskusta. Esimerkiksi varastoautomaatiojärjestelmien robottiparvet navigoivat itsenäisesti ja tehostavat varaston toimintaa. Älykkäät teollisuusrobotit puolestaan kommunikoivat reaaliaikaisesti keskenään ja jakavat työtehtäviä tuotannon optimoinnin parantamiseksi.
Miehittämättömät ilma-alukset, eli droonit ovat kehittyneet huomattavasti reilussa sadassa vuodessa. Droonit ovat erinomainen esimerkki lähitulevaisuudessa parviälyn soveltamisesta robotiikkaan autonomisina ja keskenään viestivistä miehittämättömistä ilma-aluksista, jotka valvovat, etsivät ja kuljettavat tavaroita ilman ihmisen puuttumisesta lentotoimintaan.
Xamkin North European Logistics Institute (NELI) -tutkimusyksikkö on edistänyt uusia ratkaisuja yhdistämällä käytännön kokeilut ja akateemisen tiedon. NELI-tutkimusyksikkö on keskittynyt vahvasti miehittämättömän ilmailun koulutukseen sekä teknologian ja operatiivisten prosessien kehittämiseen, edistäen droonien käyttöön liittyviä tietoja, taitoja ja osaamista.
NELI-tutkimusyksikkömme on tukenut jo useita vuosia älykkään ilmaliikenteen tutkimusta ja kehitystä tarjoamalla koulutusta tulevaisuuden ilmailun tarpeisiin ja kehittämällä käytännön ratkaisuja droonien hyödyntämiseen logistiikassa ja eri toimialoilla. NELI on tehnyt laajaa kansallista ja kansainvälistä yhteistyötä, painottaen ilmaliikenteen innovaatioita sekä ympäristövaikutusten vähentämistä. NELI:n tavoitteena on ollut kouluttaa osaajia ja edistää kestävää sekä tehokasta miehittämätöntä ilmailua Kaakkois-Suomessa.
NELI TKI -yksikkö yhdistetään 1.9.2025 alkaen Xamkin Logistiikka ja merenkulku TKI -yksikön alaisuuteen.
Xamkin Miehittämättömän ilmailun erikoisosaaja (MIERO) -tutkimushankkeessa tuotetaan uutta tietoa ja koulutusmateriaalia miehittämättömän ilmailun tulevaisuuden ammattilaisille, yrityksille ja työntekijöiden jatkokoulutustarpeisiin. Hanketta toteuttavat Kaakkois-Suomen ammattikorkeakoulu Xamk (hallinnoija) ja Kotkan-Haminan seudun koulutusyhtymä Ekami.
MIERO-hanketta rahoittaa Hämeen elinkeino-, liikenne- ja ympäristökeskus Euroopan sosiaalirahasto plus (ESR+) -ohjelmasta ja hanke päättyy 30.9.2025.
LÄHTEET
Ailisto, H. (toim.), Heikkilä, E., Helaakoski, H., Neuvonen, A. & Seppälä, T. 2018. Tekoälyn kokonaiskuva ja osaamiskartoitus. Valtioneuvosto. Saatavissa: 46-2018-Tekoalyn kokonaiskuva.pdf [viitattu 23.3.2025].
Autio, V. 2012. Parviälykkyys lineaarisissa layout-ongelmissa. Saatavissa: gradu05753.pdf [viitattu 4.4.2025].
Beni, G. & Wang, J. 1993. Swarm Intelligence in Cellular Robotic Systems. Saatavissa: https://www.tesble.com/10.1007/978-3-642-58069-7_38 [viitattu 5.4.2025].
Brambilla, M., Ferrante, E., Birattari, M. & Dorigo, M. 2012. Swarm robotics: a review from the swarm engineering perspective. PDF-artikkeli. https://doi.org/10.1007/s11721-012-0075-2 [viitattu 5.4.2025].
Haukilahti, Anna. 2018 Raman-tekniikan käyttö rikostutkinnassa. Lappeenranta University of Technology. Saatavissa: Kandidaatinty%F6_AnnaHaukilahti.pdf;jsessionid=DDEC90E266F13BAF7C327105987C67DA [viitattu 22.3.2025].
Imperial War Museums. 2025. Brief History of Drones. Saatavissa:https://www.iwm.org.uk/history/a-brief-history-of-drones [viitattu 23.3.2025].
Ehrnrooth, J., Suomalainen, J., Honkavaara, E., Markelin, L., Räsänen, N. & Naukkarinen, V. 2022. Hyperspektrikamerateknologian hyödyntäminen sähköverkkojen vianpaikannuksessa ja kunnonhallinnassa. Saatavissa: Report [viitattu 23.3.2025].
Huovila, J. 2015. Algoritmeja autonomiseen avaruustutkimukseen. Saatavissa: GRADU-1438336805.pdf. [viitattu 4.4.2025].
Kähkönen, Sanna. 2019. Parvi droneja oppii tekemään yhteistyötä. TUNI. Saatavissa: Parvi droneja oppii tekemään yhteistyötä | Tampereen korkeakouluyhteisö [viitattu 22.3.2025].
Laitinen, P. & Ronkainen, A. 2021.Tukes-raportti: Dronejen käyttö kasvinsuojelussa. Pdf. Saatavissa: https://tukes.fi/documents/5470659/149665662/Dronejen+k%C3%A4ytt%C3%B6+kasvinsuojelussa+2021.pdf/678d48c7-152d-1640-f471-28fa8fcb0f94/Dronejen+k%C3%A4ytt%C3%B6+kasvinsuojelussa+2021.pdf [viitattu 23.3.2025].
Mäkynen, Jussi. 2009. A Lightweight Hyperspectral Imager. Helsinki University of Technology. Saatavissa: HELSINKI UNIVERSITY OF TECHNOLOGY [viitattu 22.3.2025]
Panttila, H. ja Valta, R-O. 2022. Droonit tutkimuskäytössä. Web-artikkeli. Saatavissa: https://www.gtk.fi/ajankohtaista/droonit-tutkimuskaytossa/ [viitattu 30.3.2025].
Rosenberg, L. 2015. Human Swarms, a real-time method for collective intelligence. Saatavissa: DOI: 10.7551/978-0-262-33027-5-ch117. [viitattu 5.4.2025].
Salmirinne, H., Hyvönen, E., Karinen, T., Konnunaho, J., Kurimo, M., Middleton, M.,Niiranen, T., Panttila, H., Pasanen, A. ja Turunen, P. 2017. UAV-MEMO-projekti, Osa IMiehittämättömät ilma-alukset malminetsinnässä ja kaivostoiminnassa. Verkkosivu. Saatavissa: https://tupa.gtk.fi/julkaisu/tutkimusraportti/tr_232.pdf [viitattu 30.3.2025].
TEPA-termipankki 2025a. Algoritmi. Verkkosivu. Saatavissa: algoritmi | TEPA-termipankki (erikoisalojen sanasto- ja sanakirjakokoelma) [viitattu 23.3.2025].
TEPA-termipankki 2025b. Parviäly. Verkkosivu. Saatavissa: parviäly | TEPA-termipankki (erikoisalojen sanasto- ja sanakirjakokoelma) [viitattu 23.3.2025].
Tuomala, V. 2024a. Droonien kaupallinen hyötykäyttö on kasvava toimiala. Saatavissa: Droonien kaupallinen hyötykäyttö on kasvava toimiala | READ Xamk [viitattu 23.3.2025]
Tuomala, V. 2024b. Miehittämättömien laitteiden merkitys on kasvanut muutamassa vuodessa. Saatavissa: Miehittämättömien laitteiden merkitys on kasvanut muutamassa vuodessa | READ Xamk [viitattu 23.3.2025].
Tuominen, R. (toim.). 2020. Uusia menetelmiä pohjaveden laadun monitorointiin, Esa Hannus sivut 124–138. Saatavissa: URNISBN9789523442627-compressed.pdf [viitattu 23.3.2025].
Tutustu myös näihin artikkeleihin

Etelä-Savon ESR+ aluehaku: Kansalaistoimijalähtöisen kehittämisen hankehaku (1/2026) on auki 4.5.-1.6.2026!

Hakuinfo: Kansalaistoimijalähtöinen kehittäminen Itä-Suomessa
